Starting with version 7.0.0, TrackMate offers the possibility to segment objects, and store, display and quantify their shape. We used this new API to build simple detectors that can produce objects from a label image, a mask or a grayscale image with a threshold. But we also looked to integrate the state-of-the-art segmentation algorithms shipped with Fiji that do so. So we integrated the ilastik, MorphoLibJ, StarDist, cellpose and Weka plugins as detectors in TrackMate. This page lists the eight detectors that have been introduced by this version, and links to their documentation and installation procedure.
Detectors with segmentation capabilities
Mask detector
This detector creates objects from a black and white channel in the source image. You can add the mask as an extra channel in the source image. The objects will be built based on all the pixels have a value strictly larger than 0, which solves the issue of having a mask on 8-bit, 16-bit or 32-bit images. This detector is part of the core of TrackMate. It is documented here: trackmate-mask-detector
Thresholding detector
The thresholding detector creates objects from a grayscale image (it can be one channel in a multi-channel image). You have to specify a threshold value to segment the objects. This detector is also part of the core of TrackMate. It is documented here: trackmate-thresholding-detector
Label image detector
Label images are especially convenient as an output of segmentation algorithms. Indeed, in some cases you might have different objects that are so close that they touch each other. If a segmentation algorithm can detect them, but outputs a black and white mask, they will appear as one object in the mask if they share a border. In a label image, each object is represented by different integer values. For instance, the object #1 in a label image will be made from all the pixels that have a pixel value of 1, over a black background of 0. Object #2 will have the pixel value 2, etc. This allows resolving them even if they touch each other. This detector is also part of the core of TrackMate. It is documented here: trackmate-label-image-detector
TrackMate-Ilastik
This detector is not part of the core Fiji distribution. You need to subscribe to two update sites (The ilastik update site and the TrackMate-Ilastik update site) and to install ilastik to get it.
The detector installation procedure and its documentation can be found here: trackmate-ilastik.
TrackMate-MorphoLibJ
This detector is also not part of the core Fiji distribution. You need to subscribe to two update sites (The IJPB-plugins update site and the TrackMate-MorphoLibJ update site) to get it.
The detector installation procedure and its documentation can be found here: trackmate-morpholibj
TrackMate-StarDist
This detector is also not part of the core Fiji distribution. You need to have StarDist installed and running in your Fiji installation. This involves subscribing to the CSBDeep update site and the StarDist update site. And also to the TrackMate-StarDist update site.
The detector installation procedure and its documentation can be found here: trackmate-stardist
TrackMate-Cellpose
The integration of cellpose in TrackMate is an example of a different type of integration, where we call a Python program from a Java program as a sub-process, and exchange data via files. To use cellpose with TrackMate you will need to have a working installation of cellpose on your computer, and subscribe to the TrackMate-Cellpose update site.
Detailed installation procedures, documentation and tutorials can be found here: trackmate-cellpose.
TrackMate-Weka
This detector is also not part of the core Fiji distribution. But since the Weka Trainable Segmentation plugin is included in the core of Fiji, we just have to subscribe to the TrackMate-Weka update site.
The detector installation procedure and its documentation can be found here: trackmate-weka
Limitations
The detection of object shape in TrackMate two some limitations now that we repeat here.
-
Object contours are only detected for 2D images. Source images can be 2D + T with multiple channels, but shapes won’t be detected, displayed nor analyzed in 3D. This boils down to the fact that there are no (not yet) easy and robust way to handle 3D segmentation results in Fiji. This might change in the future with the work of others, but at least with version 7 we detect contours only for 2D images. In the meantime, when presented with a 3D image, the detectors described above either return an error message (the StarDist detector) or create a spherical spot of radius computed so that the spherical spot has the same volume that of the 3D object returned by the specific segmentation algorithm.
-
Object contours must be simple polygons. Simple ploygons are ploygon made of one closed segmented line that does not have any self-intersection. TrackMate does not handle holes in objects, not objects made of several disconnected components. This is a limitation that allows handling computing morphological features without ambiguity.
Simplifying contours
Several of the new detectors have a configuration setting that allows to simplify contours. It is an important paramter that we describe here.
Object contours are polygon that wraps around individual objects, initially following individual pixels. For instance, the initial output of the threshold detector for one spot looks like this:
![]()
Notice that the polygon follows exactly the contour of all pixels that are above the threshold. For instance the leftmost pixel on the image above is has 3 segments for its border. And all of the contour segments run along pixels horizontally or vertically.
Simplifying contour will yield a simplifed shape of the object, that interpolate betwen pixels and return a smoother shape with fewer segments.
The same algorithm running with the Simplify contours parameter selected will yield the following:
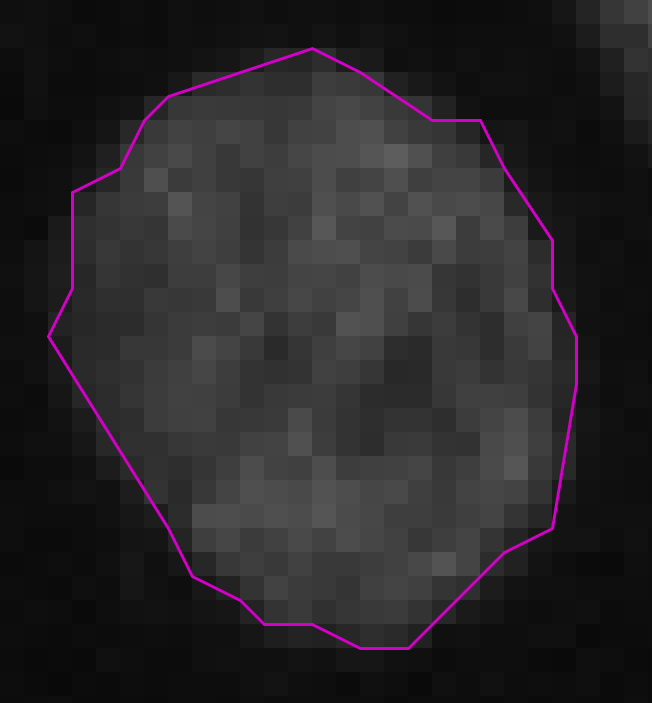
Simplifying contour generate TrackMate files that are smaller in disk space. More importantly, they yield more accurate morphological features. Indeed, the pixel-accurate contour overestimates the perimeter, because it sticks to invidual pixel borders. In turn this generate contours that have an overestimated perimeter and will negatively affect the relevance of morphological feature that depend on it.
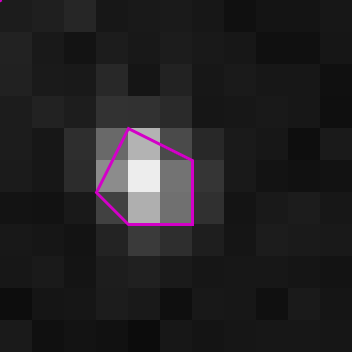
Simplifying contours somewhat tries to follow the object contour as if it would not be discretized over a pixel matrix. But it works well only if the objects are large enough. For small objects, below typically 10 pixels, the simplification generates inaccurate contours:
So as a rule of thumb we recommend the following:
- If your objects are big (N pixels larger than 10) and you want to measure their shape, always select the
Simplify contoursoption. - If your objects are sampled on a small number of pixels, it does not make sense to measure their morphology anyway.
- So basically, unselect the
Simplify contoursonly if you want to later generate a pixel-accurate mask from the objects (with for instance theExport label imageaction).